“What arm do I hold the weight with?”
“What leg goes forward?”
“How do you want to use?「
「なんでこんなことしてるんだ」
これらは私がトレーニングセッションでいつも聞く共通の言葉です。特に、分割スタンスや片足立ち、腕で重量を保持するような動作で、です。
特に、正確な目標が明らかでないような新しい動きや、ほとんどの解剖図には載っていない筋膜スリング システムや神経駆動を利用したポジショニングでは、すべてをまとめると混乱してしまうかもしれません。
同側性とは、同じ側の腕と足を使うことです。たとえば、ボクサーが右手でパンチを放ち、右足からドライブするようなものです。
このような動作の利点は、足からの衝撃が体全体をかなり効率的に伝わり、しっかりとしたレバーシステムを通じて伸びるため、システム全体で関節圧縮張力が発生することです。
史上最も恐れられた打者の1人であるマイク・タイソンが、ボディアッパーカットのコンボで、バカにならない量の腰の伸展と回転をどのように発生させているか見てみましょう。
『Anatomy Trains』でThomas Myersが示した横方向の筋膜ラインは、駆動する足と打撃を与える腕の間の多くの解剖学的つながりをカプセル化したものです。

Anatomy Trains を読んでいない人が解剖学を扱うとしたら、一歩遅れていることになりますね。
収縮時には、ライン全体を通して大きなレベルの剛性を生み出すことができ、巻き上げられたバネのような状態にすることが可能です。 この弾力性と剛性は、手から力を出すだけでなく、歩いたり走ったりするときのように、足から力を出すときにも使われます。 足から生み出される後ろへの力と、同じ側の腕から生み出される前への力。 股関節の伸展と外旋は、反対側のコアからの屈曲、回転、側屈と拮抗する動きとなり、ロコモーションに見られる上下の回転を生み出す。

これは非常に複雑なシステムですが、ここでは非常に簡略化して説明されています。 しかし、この記事を5000字以内に収めるために、このままにしておきます。
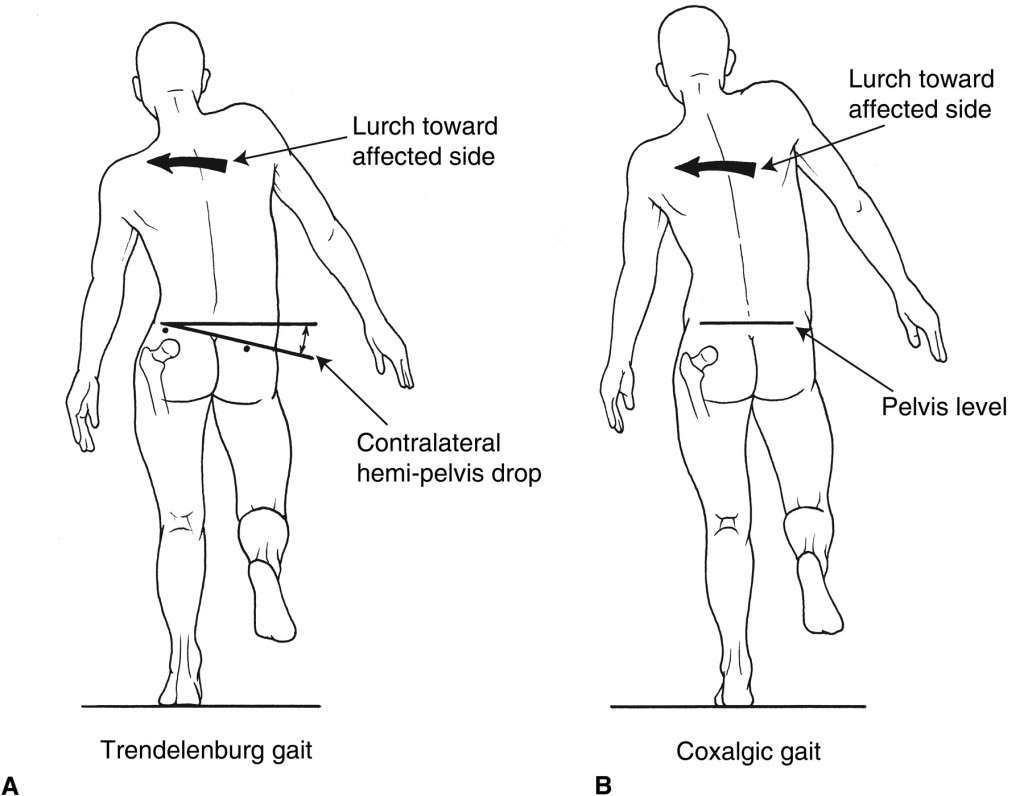
このシステムの制御がうまくいかないのは、脚から腕へ効率よくパワーを伝達するための、腰と体幹の反応力がない場合によく起こります。 これは、股関節の外側の痛み、ITバンドの問題、膝の内側の痛み、スネを痛めるランナーによく見られる問題で、テクニックよりも量を重視するランナーにはよく見られることです。 また、対側安定システムの安定性要件を減らそうと、股関節を強く傾けているようなコクサルティック歩行も見られます。
すべてのマラソンランナーの22マイル地点の姿勢。
すべてのマラソンランナーの22マイル地点の姿勢。 ランナー。 Ever.
水平方向の力生成から垂直方向の力生成になるとき、連続性は多少途切れるようです。 この場合、バスケットボールの典型的なレイアップで見られるように、対側リンクが好まれるようで、シュートアームは対側の脚から伸びます。
では、これがトレーニングになるとどうなるのでしょうか?
この動作における強力な力は、前述のとおり、右股関節の伸展と回転です。
ラインを伸ばすことはできますか?
慢性的に「きつい」股関節屈筋を持つ人は、これを絶対に嫌がる傾向があり、なぜ腕を地面と平行より高くできないのか不思議でなりません。
より神経発達のレベルでは、ローリングパターンは同側パターンを新しい方向に持っていきます。
これらの問題に行き詰まると、息を止め、より強く曲げて通り抜けようとする傾向がありますが、これが答えではないことに気づきません。
これが行き詰まると、息を止め、より強く曲げて乗り切ろうとしがちですが、それでは解決になりません。 簡単になってしまえば、使い続ける理由はないのですが、多くの人にとっては長い間、厄介なものです。
同側の動作が駆動動作と考えられるのに対し、反対側の動作は引きやリーチが主体の動作と考えられます。
反対側の動作の多くは、後方機能線として知られる、相互につながった組織のラインを使用することに依存しています。 この線は、片方の腰の大殿筋と反対側の広背筋を結んでおり、基本的に腰をX字型に横切り、安定性と加速性のレベルを提供します。
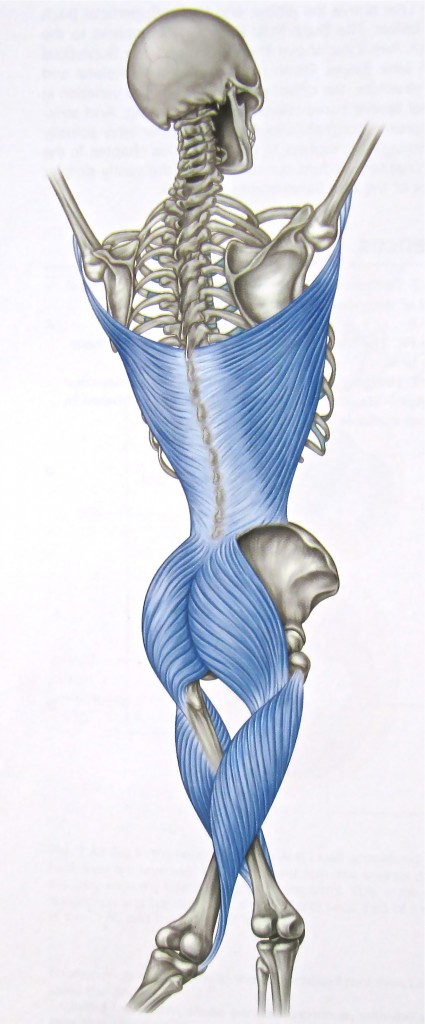
このシステムの主な役割は、片足デッドリフトなど、体の方に引く力を作り出すことです。
大臀筋と広背筋は同時に伸び、たまたま胸腰部の筋膜を通して腰が安定しているのです。
このラインの二次的な使用は、同側のラインからのドライブに対するアンタゴニストとしてです。
このラインは、同側のラインからの駆動の拮抗として使用されます。 この前方への膝の駆動は、特に腕の伸展と相まって、機能線を伸展させ、緊張させる。
同側のドライブと反対側のプルを組み合わせることは、這うパターンのように、ロコモーションの基本テネタの1つです。 「どの腕と脚のコンボか? 基本的に、私が使用している方法は、ドライブ動作であれば、同側が最大のパワー生産と安定性を生み出し、つまり、右手が右足を後ろに持っていくことを意味します。 つまり、右手は右足の後ろ。左手は左足の前、もしくは立っている。 面白いことに、どちらも同じような姿勢になるため、より簡単です。 これが唯一の方法というわけではありませんが、私が多くのクライアントに使って成功した方法であり、うまく機能しているようです。